")
")
| Issue |
Sci. Tech. Energ. Transition
Volume 79, 2024
Emerging Advances in Hybrid Renewable Energy Systems and Integration
|
|
|---|---|---|
| Article Number | 65 | |
| Number of page(s) | 8 | |
| DOI | https://doi.org/10.2516/stet/2024058 | |
| Published online | 16 September 2024 | |
Regular Article
Study of power distribution improvement in stand-alone parallel system with dual VSG converter
1
Shijiazhuang Campus of Army Engineering University of PLA, Ning'an Street, Shijiazhuang 050000, China
2
Xiangtan University, Yanggutang Street, Xiangtan 411100, China
* Corresponding author: This email address is being protected from spambots. You need JavaScript enabled to view it.
Received:
13
June
2024
Accepted:
18
July
2024
Abstract
With the popularization of microgrid system especially in mining caves, remote islands, and other areas, the independent microgrid system greatly improves its quality of life and improves its working environment. However, the large-scale use of power electronic equipment makes the stability of the region’s independent power supply system decline, making it easy to cause serious consequences such as delinking in the face of different perturbations, the cause of which is mostly due to the irrational distribution of perturbation power. Based on this, this paper selects the parameters to be modified for the time scale by comparing the advantages and disadvantages of the two types of parallel systems, and then reasonably sets the ratio of key parameters according to the size of the perturbation to maximize the power supply duration and safety of components, and finally verifies its validity through Matlab/Simulink.
Key words: PQ control / VSG control / Parallel system / Power distribution
© The Author(s), published by EDP Sciences, 2024
 This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
This is an Open Access article distributed under the terms of the Creative Commons Attribution License (https://creativecommons.org/licenses/by/4.0), which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
1 Introduction
In remote areas such as islands, remote mountainous areas, and mines, most of them cannot be connected to the public power grid and rely on independent microgrid systems for power supply. This system consists of multiple converters connected in parallel, one adopts a grid-constructing type converter, and the rest can be grid-following or grid-constructing type converters, and currently, most of them are used in parallel with Virtual Synchronous Generator (VSG) control and Power Quality (PQ) control or VSG control. The system topology is shown in Figure 1. Disturbance is more common in system operation, this paper divides the disturbance into long-time disturbance and instantaneous disturbance in time scale, and divides it into different disturbances according to the size of disturbance in space scale, and explores how the system can reasonably allocate the disturbance power for a certain disturbance in time and space scale. In the literature [1] it is shown that the dual VSG control system has more stability. However the system is not perfect, literature [2] improves the power allocation accuracy by adding virtual negative impedance and improving the reactive power control method. Literature [3] proposes a correlation of multiple VSGs, which can form a stable system between different sources to achieve reasonable power allocation. Most academics control the power allocation by adding virtual impedance or changing the line impedance, but without considering factors such as capacity. In this case, this paper focuses on analyzing the advantages and disadvantages of the two types of independent parallel systems, combining the spatial and temporal scales of the disturbed power, and then proposing a power allocation scheme for specific disturbances.
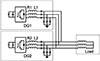 |
Fig. 1 Topology of dual converter independent parallel system. |
2. Basic principle of converter control
2.1 VSG control fundamentals
The VSG control method achieves control of the phase of the output voltage of the converter bridge arm by simulating the rotor equations to establish an active control loop [4]. The VSG rotor equations are as follows: (1)where J is the rotational inertia, w is the angular velocity of the synchronous machine, wn is the rated angular velocity, Tm is the mechanical torque, Te is the electromagnetic torque, and D is the damping coefficient.
(1)where J is the rotational inertia, w is the angular velocity of the synchronous machine, wn is the rated angular velocity, Tm is the mechanical torque, Te is the electromagnetic torque, and D is the damping coefficient.
The reactive power control loop can be obtained from the converter bridge arm output voltage magnitude [5], which can be achieved mainly by organizing the electromagnetic equations of the analog Synchronous Generator (SG): (2)
E is the port voltage, E0 is the no-load voltage, Qref is the reactive power reference value, Q is the reactive power sampling value, Uref is the voltage reference value, U is the voltage sampling value, Kq is the reactive power sag coefficient, and Ku voltage sag coefficient.
(2)
E is the port voltage, E0 is the no-load voltage, Qref is the reactive power reference value, Q is the reactive power sampling value, Uref is the voltage reference value, U is the voltage sampling value, Kq is the reactive power sag coefficient, and Ku voltage sag coefficient.
The elaboration of the basic principles of VSG shows that the introduction of virtual inertia and damping coefficients in the VSG control method [6] gives the system in the transient process VSG control method a more powerful frequency support.
2.2 PQ control fundamentals
The converter under PQ control is equivalent to a current source, which controls the current magnitude by inputting an active power command and a reactive power command to achieve constant power output. Meanwhile, since the PQ control cannot generate phase information autonomously, it is necessary to use a phase-locked loop to extract the phase information of the utility grid to be fed into the PQ control loop [7].
The PQ control schematic is shown in Figure 2.
 |
Fig. 2 Schematic diagram of PQ control. |
As can be seen from Figure 2, the power command is converted into a current reference command through the power outer loop into the current inner loop, and finally, the voltage reference value is sent into the voltage-current double closed loop through the Pike inversion, and finally the converter is controlled by sinusoidal pulse width modulation to output constant power by the power command. The power outer loop and current inner loop mathematical models are shown in equations (3) and (4): (3)
(3)
 (4)
idref is the d-axis current reference, Pref is the power reference value, kp1 is the d-axis current loop scale factor, ki1 is the d-axis current loop integration factor, iqref is the reference value for q-axis current, Qref is the reference value of reactive power, kp3 is the q-axis current loop scaling factor, ki3 is the q-axis current loop integration factor, ud1 is the d-axis voltage value, idref is the reference value for d-axis voltage, kp2 is the d-axis voltage loop scaling factor, ki2 is the d-axis voltage loop integration factor, uq1 is the q-axis voltage value, iqref is the reference value for q-axis voltage, kp4 is the q-axis voltage loop scaling factor, ki4 is the q-axis voltage loop integration factor.
(4)
idref is the d-axis current reference, Pref is the power reference value, kp1 is the d-axis current loop scale factor, ki1 is the d-axis current loop integration factor, iqref is the reference value for q-axis current, Qref is the reference value of reactive power, kp3 is the q-axis current loop scaling factor, ki3 is the q-axis current loop integration factor, ud1 is the d-axis voltage value, idref is the reference value for d-axis voltage, kp2 is the d-axis voltage loop scaling factor, ki2 is the d-axis voltage loop integration factor, uq1 is the q-axis voltage value, iqref is the reference value for q-axis voltage, kp4 is the q-axis voltage loop scaling factor, ki4 is the q-axis voltage loop integration factor.
3 Advantages and disadvantages of parallel system
3.1 Independent system with PQ control in parallel with VSG control
After the two microgrid systems are connected in parallel, one of the converters is switched to PQ control for maximum power output. This is conducive to the maximum utilization of the new energy, while not bearing the disturbance power, i.e., the output power is almost unchanged during the disturbance. However, there are still shortcomings, as the PQ-controlled converter was originally controlled by a VSG [8], which also implies the existence of an energy storage system as a source of power supply. If the stored energy is used for power supply at this time, its service life will be damaged and its stable power supply characteristics cannot be fully utilized. If the energy storage is not involved in the power supply, when the disturbance occurs, due to the PQ control characteristics, the energy storage can not provide support, the energy is not fully utilized and even triggers another converter overcurrent protection.
3.2 Independent type system with dual VSG control in parallel
A stand-alone system with two VSGs in parallel is widely used, especially in areas where critical loads are located, to provide a high level of reliability. It has the advantages of synchronous generators, such as sharing the disturbed power. However, when one of the converters is subjected to a local disturbance, it is easy to detach from the system, which in turn causes a secondary shock [9]. Secondly, in the face of perturbation, there is an unreasonable situation of power sharing among the converters of the system operating in parallel, such as a small capacity converter bearing a large perturbation power.
4 VSG converter-based power distribution improvement scheme for stand-alone shunt system
4.1 Fundamentals of power distribution in a stand-alone system with dual VSG-controlled parallel connection
In the VSG control, the inertial response of the actual synchronous generator is simulated by introducing virtual inertia, which plays the role of supporting the system frequency. During sudden load application, the power ∆P supplied by the converter is obtained from the rotor equation as: (5)where D is the virtual damping coefficient; J is the virtual inertia; wn the rated angular velocity; and
(5)where D is the virtual damping coefficient; J is the virtual inertia; wn the rated angular velocity; and  is the frequency change rate [10].
is the frequency change rate [10].
In the face of a long-time disturbance, the rate of change of frequency is small, when the disturbance power is: (6)
(6)
Therefore, the proportion of disturbed power allocated to the converter in the system is: (7)
(7)
However, since too large a damping coefficient can exacerbate the steady state error, the value of the damping coefficient is controlled to be within the allowable error range by changing the ratio of the damping coefficients [11].
In the face of transient perturbations, the rate of change of frequency is large, when the perturbation power is: (8)
(8)
Therefore, the proportion of disturbed power allocated to the converter in the system is: (9)
(9)
In summary, changing the damping coefficient ratio in the face of long time disturbance will obtain better steady-state characteristics. In the face of transient disturbances, changing the ratio of virtual inertia will obtain better transient characteristics.
However, at present, there is no reasonable basis for the selection of these two parameters in the academic world, and most of them are taken with the help of artificial experience. In the design of J, the natural vibration angular frequency wz is usually set between 0.628 and 15.700 using the actual synchronous generator as a reference [12], so the value of J can be obtained. The value of D is calculated by the automatic control principle when the system damping coefficient ε = 0.707.
4.2 Improvement program
When designing the power allocation, there are many factors to consider, such as energy storage capacity, electricity, discharge multiplier, maximum power, maximum current, and so on. In this paper, the design of the virtual inertia and damping coefficient combined with the capacity, maximum output power and maximum current makes the power allocation more reasonable when facing different disturbances [13]. In practice, although there are problems such as communication delays, the delays are almost negligible because the system explored in this paper is a stand-alone system that uses local communication.
In the face of long-time disturbance, i.e., disturbance duration is long, such disturbance is mostly caused by excessive power load. If the disturbance power is less than the sum of the maximum withstand power of each converter, at this time, it should ensure that the load can be supplied for a long time, so according to the proportion of the capacity of each converter to configure the damping coefficient ratio, so that the disturbance power is allocated by the capacity size in order to ensure that the power supply is provided for a long period of time. If the disturbance power is greater than the sum of the maximum withstand power of each converter, under the premise of preventing device burnout, the power supply time should be prolonged as much as possible. According to the maximum power of the converter to configure the proportion of damping coefficients, the disturbance power is allocated by the maximum power [14], and at the same time, the removal of unimportant loads, which not only ensures that the power supply is provided for a long period of time but also improves the reliability.
In the face of transient perturbation, i.e., short duration of perturbation, such perturbation is mostly short-circuit faults. In the face of higher power impact, the reliability of the power supply should be considered first rather than the continuity. If the disturbance time is less than the maximum withstand current, the maximum withstand current ratio of each converter should be used as the virtual inertia ratio to improve the inrush current resistance. If the withstand time is greater than the maximum withstand current, the device is easy to burn, so the virtual inertia is configured according to the maximum power of the converter [6], so that the disturbed power is distributed according to the maximum power, and at the same time, the unimportant loads are removed, to ensure the reliability of the power supply and the safety of the equipment. Based on the above principles of configuration parameters, the control flow chart shown in Figure 3 and the configuration method in Table 1 can be obtained.
 |
Fig. 3 Control flowchart. |
Configuration method table.
5 Simulation verification
To verify the effectiveness of the improved method, a dual VSG-independent parallel system is built in Matlab/Simulink, and the setup parameters are shown in Table 2. Since the simulation system cannot be made to run continuously for several hours, this paper uses a scale of 1:12000 to scale the time.
System parameters.
Uref is the rated voltage, Pref1, Pmax1, S1, IMAX1, t1, J1, D1 is the No. 1 converter rated power, maximum power, rated capacity, maximum tolerable current, permissible operation time under maximum tolerable current, virtual inertia, damping factor, Pref2, Pmax2, S2, IMAX2, t2, J2, D2 is the No. 2 converter rated power, maximum power, rated capacity, maximum tolerable current, allowable running time under maximum tolerable current, virtual inertia, damping coefficient.
The system is designed to have a 1.5 kW disturbed load at 1 s, and then a 1.5 kW disturbed load at 2 s, which exceeds the maximum power that the system can handle by 500 W, and the 500 W load is removed at 2.01 s. A 2 kW transient load appears at 2.3 s and lasts for 0.02 s, and a 2.5 kW transient load appears at 2.7 s and lasts for 0.03 s, during which the 500 W power is removed at 2.71 s, and is put back into service at 2.74 s after the disappearance of the transient load, and the waveform of the active power is shown in Figure 4. Meanwhile, the corresponding parameter ratios are calculated according to Table 2, as shown in Table 3.
 |
Fig. 4 Active power waveform. |
Configuration table of corresponding parameters of the simulation system.
As shown in Figures 5, 6, and 7, at 1 s, the nature of the disturbance is a long-time disturbance and the disturbance power is less than the maximum withstand power, and the disturbance power is distributed by the damping coefficient ratio of 2:1. At this time, the No. 1 converter current is 24.05 A, and the No. 2 converter current is 11.95 A.
 |
Fig. 5 Current waveform of No. 1 converter. (a) Waveform of 1.5 kW disturbance load current occurring at 1 s; (b) Waveform of 1.5 kW disturbing load current at 2 s; (c) Waveform of 2 kW instantaneous load current at 2.3 s; (d) Waveform of the instantaneous load current of 2.5 kW occurring at 2.7 s. |
 |
Fig. 6 Current waveform of No. 2 converter. (a) Waveform of 1.5 kW disturbance load current occurring in 1 s; (b) Waveform of 1.5 kW disturbing load current at 2 s; (c) Waveform of 2 kW instantaneous load current at 2.3 s; (d) Waveform of 2.5 kW instantaneous load current at 2.7 s. |
 |
Fig. 7 Fluctuation of important parameters in parallel system. (a) Waveform of the damping factor of converter No. 1; (b) Waveform of damping factor of converter No. 2; (c) Virtual inertia waveform of converter No. 1; (d) Virtual inertia waveform of converter No. 2. |
Two seconds and then into the 1.5 kW disturbed load, the nature of the disturbance for a long time disturbance and the disturbance power is greater than the maximum withstand power, disturbed power in accordance with the damping factor ratio of 24:11 distribution, at this time, the No. 1 converter current is 26.05 A, the No. 2 converter current is 12.98 A. Then in 2.01 s remove the 500 W load, at this time, the No. 1 converter current is 25.45 A, and the No. 2 converter current is 12.68 A.
In 2.3 s there is a 2 kW instantaneous load, the nature of the disturbance is an instantaneous disturbance and the inrush time is less than the maximum withstand current that can be run for a period of time, the disturbed power by the damping coefficient of the ratio of 13:12 allocation. At this time, the No. 1 converter current is 28.35 A, No. 2 converter current is 13.91 A.
In 2.7 s there is a 2.5 kW instantaneous load, the nature of the disturbance is an instantaneous disturbance and the inrush time is greater than the maximum withstand current that can be run for a period of time, the disturbance power by the damping coefficient ratio of 24:11 allocation, at this time, the No. 1 converter current is 29.07 A, the No. 2 converter current is 14.21 A. The 500 W of power is removed in 2.71 s, at which time the current in the No. 1 converter is 28.37 A and the current in the No. 2 converter is 13.95 A.
6 Conclusion
In order to address the system stability degradation caused by unreasonable disturbance allocation, this paper firstly introduces the advantages and disadvantages of the dual VSG independent type shunt system, the independent type system with PQ control converter and VSG control converter in parallel in terms of power allocation based on the basic principles of VSG control and PQ control [15]. Secondly, by comparing the advantages and disadvantages, it is proposed that the stability of the dual VSG independent parallel system is better, so the power allocation of this system is explored. According to the size and duration of the disturbance power, combined with the characteristics of virtual inertia and damping coefficient, the power improvement scheme is proposed in this paper. Finally, the validity is verified by Matlab/Simulink. This scheme is able to propose a corresponding improvement scheme for the dual VSG-independent parallel system based on the spatial and temporal scales when disturbances occur.
References
- Zhang L., Zheng H., Wan T., Shi D., Lyu L., Cai G. (2021) An integrated control algorithm of power distribution for islanded microgrid based on improved virtual synchronous generator, IET Renew. Power Gener. 15, 2674–2685. [CrossRef] [Google Scholar]
- Liu G., Jing Y., Wang W., Blaajerg F. (2019) An improved reactive power control strategy for the parallel inverter system based on VSG, in: 2019 22nd International Conference on Electrical Machines and Systems (ICEMS), Harbin, China, 11–14 August, IEEE, pp. 1–6. https://doi.org/10.1109/ICEMS.2019.8922222. [Google Scholar]
- Rasool A., Yan X., Rasool H., Guo H. (2018) Correlation between multiple VSG sources for enhancing the power allocation in microgrid, in: 2018 IEEE Electrical Power and Energy Conference (EPEC), Toronto, ON, Canada, 10–11 October, IEEE, pp. 1–6. https://doi.org/10.1109/EPEC.2018.8598344. [Google Scholar]
- Wang Y., Liu B., Duan S. (2019) Transient performance comparison of modified VSG controlled grid-tied converter, in: 2019 IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March, IEEE, pp. 3300–3303. https://doi.org/10.1109/APEC.2019.8722121. [Google Scholar]
- Liang W., Liu Y., Shen Y. (2023) Active power control integrated with reactive power compensation of battery energy stored quasi-Z source inverter PV power system operating in VSG mode, IEEE J. Emerg. Sel. Top. Power Electron. 11, 1, 339–350. https://doi.org/10.1109/JESTPE.2021.3137397. [CrossRef] [Google Scholar]
- Chen S., Sun Y., Han H., Shi G., Guan Y., Guerrero J.M. (2023) Dynamic frequency performance analysis and improvement for parallel VSG systems considering virtual inertia and damping coefficient, IEEE J. Emerg. Sel. Top. Power Electron. 11, 1, 478–489. https://doi.org/10.1109/JESTPE.2022.3208249. [Google Scholar]
- Alshalawi A., AL-Barrak H., Khalid M. (2022) P-Q control of microgrid with energy storage using adaptive controller, in: 2022 Saudi Arabia Smart Grid (SASG), Riyadh, Saudi Arabia, 12–14 December, IEEE, pp. 1–7. [Google Scholar]
- Sun K., Yao W., Wen J. (2021) Dual-loop PQ control scheme for transient stability enhancement and current limitation of VSG, in: 2021 International Conference on Power System Technology (POWERCON), Haikou, China, 8–9 December, IEEE, pp. 1732–1736. https://doi.org/10.1109/POWERCON53785.2021.9697753. [Google Scholar]
- Ge S., Zhiyu Z., Jin L. (2018) Study on control strategy of circulation suppression in parallel with multiple VSG, 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June, IEEE, pp. 1326–1331. https://doi.org/10.1109/ICIEA.2018.8397914. [CrossRef] [Google Scholar]
- Babayomi O., Li Z., Zhang Z. (2020) Distributed secondary frequency and voltage control of parallel-connected VSCS in microgrids: A predictive VSG-based solution, CPSS Trans. Power Electron. Appl. 5, 4, 342–351. https://doi.org/10.24295/CPSSTPEA.2020.00028. [CrossRef] [Google Scholar]
- Guo J., Fan Y. (2021) VSG-based parameter adaptive control strategy, E3S Web Conf. 257, 02041. https://doi.org/10.1051/e3sconf/202125702041. [CrossRef] [EDP Sciences] [Google Scholar]
- Zhen T., Fu X., Lv J., Zhu H. (2021) Adaptive control strategy of VSG based on improved multi-objective particle swarm optimization algorithm, E3S Web Conf. 248, 01063. https://doi.org/10.1051/e3sconf/202124801063. [CrossRef] [EDP Sciences] [Google Scholar]
- Chen M., Zhou D., Wu C., Blaabjerg F. (2021) Characteristics of parallel inverters applying virtual synchronous generator control, IEEE Trans. Smart Grid 12, 6, 4690–4701. https://doi.org/10.1109/TSG.2021.3102994. [CrossRef] [Google Scholar]
- do Nascimento T.F., Salazar A.O. (2023) Impedance model based dynamic analysis applied to VSG-controlled converters in AC microgrids, IEEE Trans. Ind. Appl. 59, 3, 2720–2730. https://doi.org/10.1109/TIA.2023.3234238. [CrossRef] [Google Scholar]
- Wang Z., Meng F., Zhang Y., Wang W., Li G., Ge J. (2023) Cooperative adaptive control of multi-parameter based on dual-parallel virtual synchronous generators system, IEEE Trans. Energy Conver. 38, 4, 2396–2408. https://doi.org/10.1109/TEC.2023.3283048. [CrossRef] [Google Scholar]
All Tables
All Figures
|
Fig. 1 Topology of dual converter independent parallel system. |
| In the text | |
|
Fig. 2 Schematic diagram of PQ control. |
| In the text | |
|
Fig. 3 Control flowchart. |
| In the text | |
|
Fig. 4 Active power waveform. |
| In the text | |
|
Fig. 5 Current waveform of No. 1 converter. (a) Waveform of 1.5 kW disturbance load current occurring at 1 s; (b) Waveform of 1.5 kW disturbing load current at 2 s; (c) Waveform of 2 kW instantaneous load current at 2.3 s; (d) Waveform of the instantaneous load current of 2.5 kW occurring at 2.7 s. |
| In the text | |
|
Fig. 6 Current waveform of No. 2 converter. (a) Waveform of 1.5 kW disturbance load current occurring in 1 s; (b) Waveform of 1.5 kW disturbing load current at 2 s; (c) Waveform of 2 kW instantaneous load current at 2.3 s; (d) Waveform of 2.5 kW instantaneous load current at 2.7 s. |
| In the text | |
|
Fig. 7 Fluctuation of important parameters in parallel system. (a) Waveform of the damping factor of converter No. 1; (b) Waveform of damping factor of converter No. 2; (c) Virtual inertia waveform of converter No. 1; (d) Virtual inertia waveform of converter No. 2. |
| In the text | |
Current usage metrics show cumulative count of Article Views (full-text article views including HTML views, PDF and ePub downloads, according to the available data) and Abstracts Views on Vision4Press platform.
Data correspond to usage on the plateform after 2015. The current usage metrics is available 48-96 hours after online publication and is updated daily on week days.
Initial download of the metrics may take a while.